
第25回
「みちびき」位置情報で小型ボートの自動離着桟技術を開発。
こだわりのボートメーカー
ニュージャパンマリン九州株式会社 山本 茂
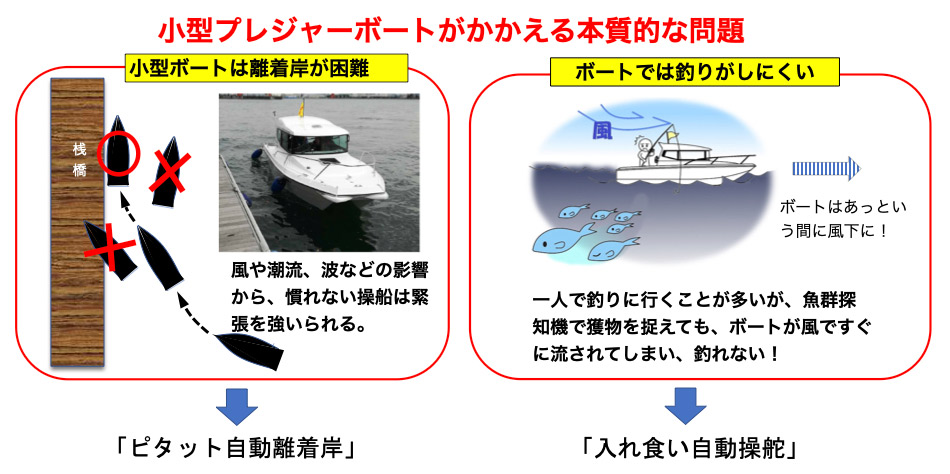
船のレジャーであるプレジャーボートのオーナーにとって、桟橋への着岸は大変なハードルです。無駄のない動きで着岸できればベストですが、実際は桟橋や他の船にぶつけたり、こすったりしないかドキドキ……。プレジャーボート普及のハードルになっているという離着桟を、準天頂衛星「みちびき」の測位信号を利用して解決しようとしているプレジャーボートの開発者がいます。
大分県に本拠を置くニュージャパンマリン九州株式会社は、2015年に創業した小型ボート製造、プレジャーボート開発メーカー。一般用プレジャーボートの分野で、カタマラン(双胴型)ボートを国内生産する企業はこの1社のみです。世界初の「みちびき」信号によるプレジャーボートの「ピタット自動着岸(着桟)」技術は、ボートフィッシングの釣果を追求してきた同社の山本社長にとって長年の課題であったといいます。「入れ食い自動操舵」技術にもつながる船の自動化技術とはどのようなものか、取締役社長である山本茂社長に伺いました。
--プレジャーボートの自動離着桟、自動操舵とは、どのような技術でしょうか?
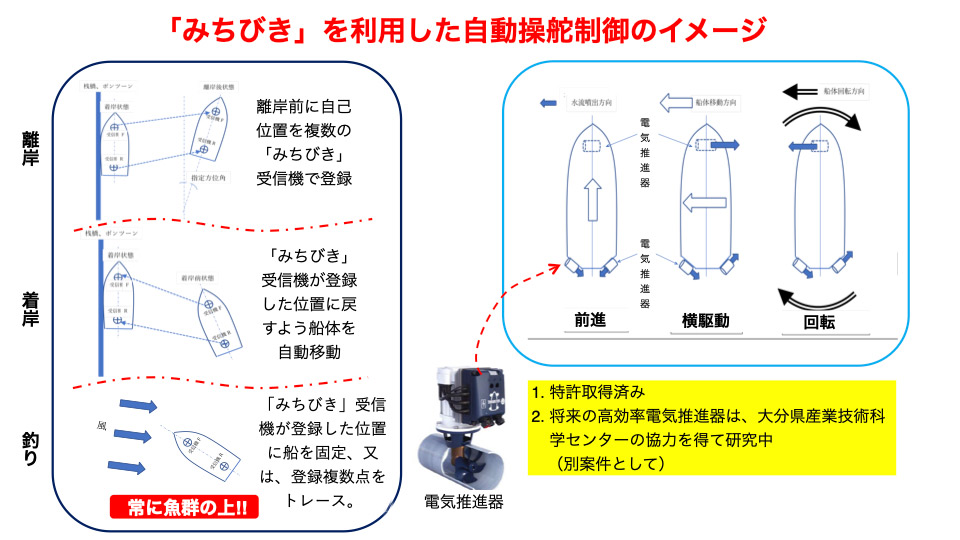
山本:プレジャーボートにとって、「着岸(着桟)」とは航空機の着陸のように難しくかつ、今まで自動化されたことのない操作です。この操作を準天頂衛星「みちびき」のCLAS補強情報を用いた複数の受信機の測位結果をもとにして、正確な位置とボートの方位を得て実現するのが「ピタット自動着岸(着桟)」技術です。また、風に流されやすい洋上でのフィッシングの際に、一定地点を安定して保持できるようボートを自動制御してフィッシングに寄与する「入れ食い自動操舵」装置の開発も目指しています。
--開発のきっかけは何でしょうか
山本:プレジャーボートをフィッシングボートとして利用している人は多いのですが、実は釣りがしにくく、なかなか釣れないのです。船を作っているのに、釣れる船を提供できないということに長いあいだ申し訳なさを感じていました。そこで30年前から「魚群の上に留められる船」を実現しようと考えていました。
なぜプレジャーボートで釣りにくいかというと、船が風に流されて動いてしまうからです。乗り合いの遊漁船がなぜ釣れるかというと、「スパンカー(風見鶏のように船尾に立てた帆)」という装置を搭載して、風により自動的に船を風上に向け、風に押される分だけ前進するといった絶妙な操船をしてくれているからです。ならばプレジャーボートでも同じことができないかと思い水中モーターを電子制御して同じようなことを自動で行う装置を30年ほど前に開発しましたが、使えるボートの大きさに制約があり、多くのボートに使えるというものではありませんでした。でも、この時にエンジンで動くボートもこまかな位置制御などは電気モーターを使えば良さそうだということを学びました。

ところが、「みちびき」は極めて精度が高く、数センチの誤差範囲にとどまることがわかりました。「これはすごい。ひょっとしたらこれならばいけるのではないか?」と思ってやってみようという気になったわけです。まずは魚釣りのためが第一歩だったのです。
その後「みちびき」を使うとセンチメートル級の誤差ならば、「従来は無理だった自動離着桟もできるのではないか」とひらめきました。「みちびき」受信機を複数使い、向きも出してコントロールすればできるのではないかと。さらに発想を変えて、「元の位置を覚えさせ、行って帰ってきたら元の位置(ホームポジション)に戻らせる」という発想に切り替えてみました。これならばプログラムがシンプルになります。
マリーナには、何百隻、何千隻という船が停泊しています。それでも船の置き場所は決まった桟橋ですから、「ホームポジション」を記憶させておけば、「戻れ」で元の位置に戻せます。
こうした構想を立てて、2019年に内閣府の実証実験公募に応募すると同時に特許化を始めました。複数の装置の位置情報を使って元に戻す、という仕組みは誰でも考えつくことだろうと思っていたのですが、何回かの特許庁とのやり取りの結果、意外にも特許が取れてびっくりしました。
画像提供:ニュージャパンマリン九州株式会社
--シンプルな発想が誰も試みていなかった自動離着桟技術につながったのですね。ボートの位置をどのように制御するのでしょうか?
山本:「みちびき」のCLAS受信機を使って正確な測位ができることで、位置がピンポイントでわかるようになりました。受信機を複数個使って前1個、後ろに2個と、三角形になるように配置すると、位置だけでなく方位もわかり、またボートの揺れによる位置情報の誤差修正も出来ます。これまでは精度の低いコンパスしかなかった方位が正確にわかるようになり、自動離着桟ができるようになりました。2020年2月に横浜で実証実験を行い、スラスターという電気推進装置による無人操舵による着岸ができることを確認しました。少し目標位置を通り過ぎてしまったものの、自動着岸に成功したのです。
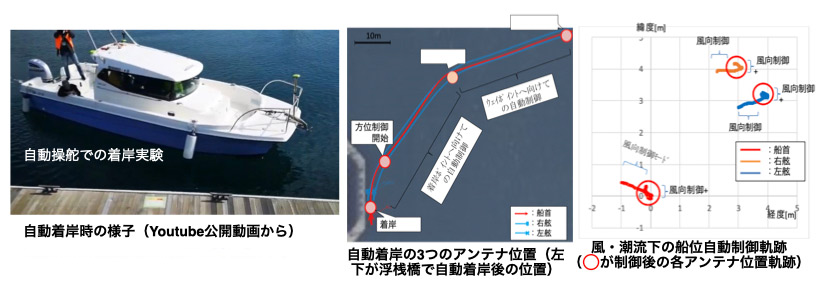
Youtube公開動画:準天頂衛星システム「みちびき」を使用した自動着岸実験
https://www.youtube.com/watch?v=FOUpZzv-57g
画像提供:ニュージャパンマリン九州株式会社
「みちびき」受信機で自動離着桟ができたので、現在は推進力のコントロールを精密にする方法を工夫しています。船の場合、自動車のブレーキにあたる仕組みがないため移動のさせかたが難しいという事情があります。大地の上なら基本的にはブレーキをかければそこに留めておくことができますが、水の上では水面が動いているので船は流されてしまいます。操船は慣性力との戦いで、行き過ぎやブレをどうコントロールするかが要点です。浮いているもので慣性力と戦うのはとても難しいのです。
操船には、スラスターという従来からある小型の推進装置を使います。モーターでトンネルの中から水流を噴き出して向きを変える装置で、フェリーなど大きな船にも普及しています。3つ取り付けると前進も後進も可能になりますから、3つ取り付けました。同じスラスターを前に取り付けると「バウスラスター」、後ろに取り付けると「スタンスラスター」と呼びます。これで真横移動もできるようになるのです。これを基本に現在はエンジンの推力も利用してスラスターの数を減らせないかエンジンメーカーの協力も得て種々実験中です。
現在はプログラム化されたシンプルな動きを実行させていますが、将来は操船の上手な人の操縦を学び、プログラム化して位置情報からスラスターへの動きにつなげられないかと考えています。人間の複雑な動作を学ばせなくてはいけないので難しいですが、だんだんと制約条件がわかってきました。
--開発チームの役割は?
山本:開発チームは、設計担当を含めて3名。機能的な設計のほかに、船の「格好よさ」をデザインする外部のアートデザイナーも1名います。プレジャーボートは「型」から制作するので、型制作担当が4名です。オス型と呼ばれる木型を制作して表面をつるつるに磨き、オス型からメス型を製造します。メス型の内側に素材を貼り付けて船体を製造するわけです。型を作るのはベテランにしかできない、大工さんのような作業ですね。木型製作まで手掛けているのは、私たちニュージャパンマリン九州と国内にはあともう1社しかありません。

画像提供:ニュージャパンマリン九州株式会社
--製品化、市場投入はいつごろでしょうか?
山本:「みちびき」受信機による自動離着桟機能を組み込んだプレジャーボートは、2021年に市場投入するのが目標です。当初は、新型のプレジャーボート製品から発売する予定で、第1段階のレバーひとつで手動操作するタイプは2021年の6月ごろまでの製品化が目標です。「みちびき」制御になるのが2021年夏ごろの予定です。「みちびき」対応型の初期モデルですと、3000万円くらいのクラスになるでしょう。その後もっと低価格のものや既存の船に後から取り付けられるものなどに製品を広げていく予定です。
製品化に向けては、すでに大手自動車メーカーや操舵器メーカー、「みちびき」受信機メーカーと協業していて、プログラムが完成すれば製品化できる段階になっています。その後は、既存の市場に対応できるよう後付けでの対応を進めていく予定です。
--具体的な製品の予定が見えて、市場からの期待が大きそうですね。
山本:実は、市場からの反応はまだ多くはないですね。それは、「自動化なんてできるわけない」と思われているからです。プレジャーボートの顧客にはボートフィッシングを楽しみたいリタイア後のサラリーマンの方なども多いのですが、問題は船を繋留するマリーナです。多くの人は月に1回程度、少ない人ですと1年に1回くらいしか操船する機会がありません。なかなか操船に慣れるということができないのですね。そうした人にとって、東京や神奈川の混み合ったマリーナでの着岸や着桟はそれだけでハードルです。着岸の際に、桟橋や他の船にぶつけてしまう事故が起きやすい。人命に関わるような事故ではありませんが、桟橋にぶつけるならばまだしも、数億円もするような高級な船も珍しくないところで他の船にぶつけたくないですよね。ですから、自動離着桟ができればそのハードルを下げられる。市場の活性化が期待できます。
--プレジャーボートの顧客は個人の方が中心でしょうか?
山本:個人用の小型ボートはシェアやレンタルなどの利用形態もあって伸びている市場なのですが、もうひとつ業務用の需要もあります。特に水上タクシーですね。そこで製品の見込みがついたら売り込みをかける予定です。
水上タクシーの場合、バスの停留所のように決まったところに離着桟を繰り返さないといけないという課題があります。特に東京は、観光用と緊急時の防災備蓄品の運搬を兼ねて東京都が水上タクシーの整備を進めています。東京は運河が多く、水の流れる運河は道路が動いているようなものですから、決まったところにピタッと付けるのは本当に難しいのですね。しかも停留所は増設中で現在100か所以上もあるようです。
そうした事情があって、水上タクシーの台数を確保したいと思っても頻繁な離着岸技術をこなせるベテラン操船者を確保しにくいのです。ボート教習のインストラクターでも「着岸は難しい」というほどで、離着岸の難しさは昔から業界でも悩みの種でした。
位置の誤差がセンチメートル単位ですから、ボートだけでなく実は方位把握をコンパスに頼っている大きな船ほど精細さが必要になっていくわけです。ですから、小型のボートにおける自動制御だけでなく、大型船の一般船舶でも期待値が高いことがわかってきました。私はずっとプレジャーボートを作ってきたものですから、「操船に慣れていないため難しく、事故が多い」のがプレジャーボートならではの事情だと思っていたのです。そうではなく、実際はむしろ一般貨物船、フェリー、観光船など大型船のほうが問い合わせは多いのです。大きな船は着岸が難しく、操船者の高齢化も進みつつあります。操船する人の平均年齢はなんと68歳です。自動化の要求が大きいわけですね。
--将来に向けた課題や、さらに高機能化を目指す方向性はありますか?
山本:現在はスラスターを使った方向制御を行っていますが、将来はエンジン2機を左右独立させて制御し、スラスターを減らしてシステムを簡略化できないかと考えています。エンジンをハの字に取り付ける、逆ハの字に取り付けるという、2つのパターンを考えなくてはなりません。逆ハの字の場合は、船体が回りすぎてしまいコントロールが難しくなりました。ハの字に取り付けることで、理論的にはスラスターなしで制御できます。片方は前進、片方が後進の推力を出し、交差した推力のラインができて、合成力で真横移動も可能になります。ただ、実装は非常に難しいです。推力の微妙な調節も難しいですし、難問はハの字の角度です。推力の交点が少しでもずれると船が回ってしまうのです。計算上は10.2度となっていますがやってみて直し、やってみて直しの試行錯誤ですね。現状ではスラスターをひとつは使ったほうがよい状況です。
スラスターを使うとしても、新型を開発できないかと考えています。これについては大分県の産業科学技術センターの支援を受けながら研究中です
--自動離着桟、自動操船技術は総合的にボートの性能アップや市場活性化に役立つのですね。山本さんが目指すプレジャーボートの将来とはどのようなものでしょうか?
山本:私たちは、前身である自動車メーカー系の製造会社時代から長く小型ボートの開発を続けていて、「カタマラン型(双胴型)」という形状のボートに想いがあります。カタマラン型は船体が左右に別れていて横安定がよく風で流されにくい、しかも燃費効率がよいという利点があります。後ろにたつ「引き波」が細く、隅田川のような込み合った運河でも引き波が屋形船を揺らしたりせずスピードを上げることができる。日本の事情に合っているタイプのボートだと思っています。ですが、設計が難しい、生産しにくい、コスト高といった欠点があるため日本ではあまり普及していません。カタマラン型ボートの良さに、自動離着桟という付加価値があればより普及が進むという期待を持っています。
さらに、フィッシングの際にみちびきデータによる位置制御の実証を試みて、「地図上の一点にとどまる」ということは比較的簡単にできることがわかりました。今後は風のセンシング機能を加え、魚を追うように位置制御できるようにしたい。魚によって、潮と一緒に動く魚と、海底にいるタイやヒラメなど「根魚」では動きが異なります。位置制御の仕方も分けて、長年の課題である痒い所に手が届く「釣れるフィッシングボート」を実現したいですね。
PROFILE
プロフィール
ニュージャパンマリン九州株式会社
取締役社長
山本 茂
(やまもと しげる)
日産自動車時代から長きに渡りボート作りに従事。 2015年、日産自動車がボート事業から撤退した後を引き継ぎ、新会社としたスタートした。2019年度の内閣府みちびきを利用した実証実験プロジェクトに採択され、プレジャーボートの自動操舵技術を開発・実証。2020年度に製品化開発を実施し、2021年度に市場投入予定である。今後、水上タクシーや大型船への横展開も視野に入れている。当システムは2020年度大分県ビジネスグランプリ優秀賞も受賞した。